The Cause of Spatial Disorientation
http://ftp.rta.nato.int/public//PubFull ... 086-01.pdf
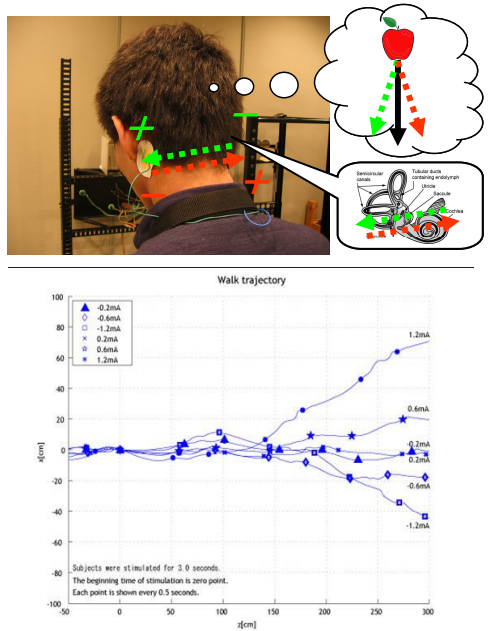
If, for example, we are rotated on and about an earth vertical axis with a constant velocity, our sense of
(angular) motion will vanish within tens of seconds (Fig. 2)
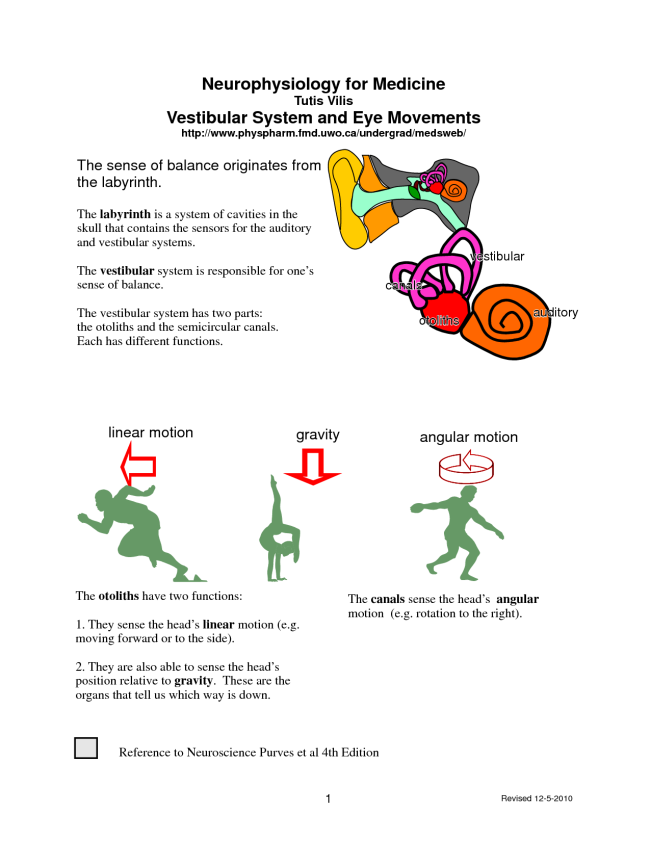
Inertia and gravity
If we are moved in space, there are only six degrees of freedom (DoF) to be dealt with. We can be translated,
giving rise to a change in position or velocity, and this may be characterised by the linear acceleration
a=d2x/dt2, a vector with three components along three (orthogonal) axes. A rotation may additionally change
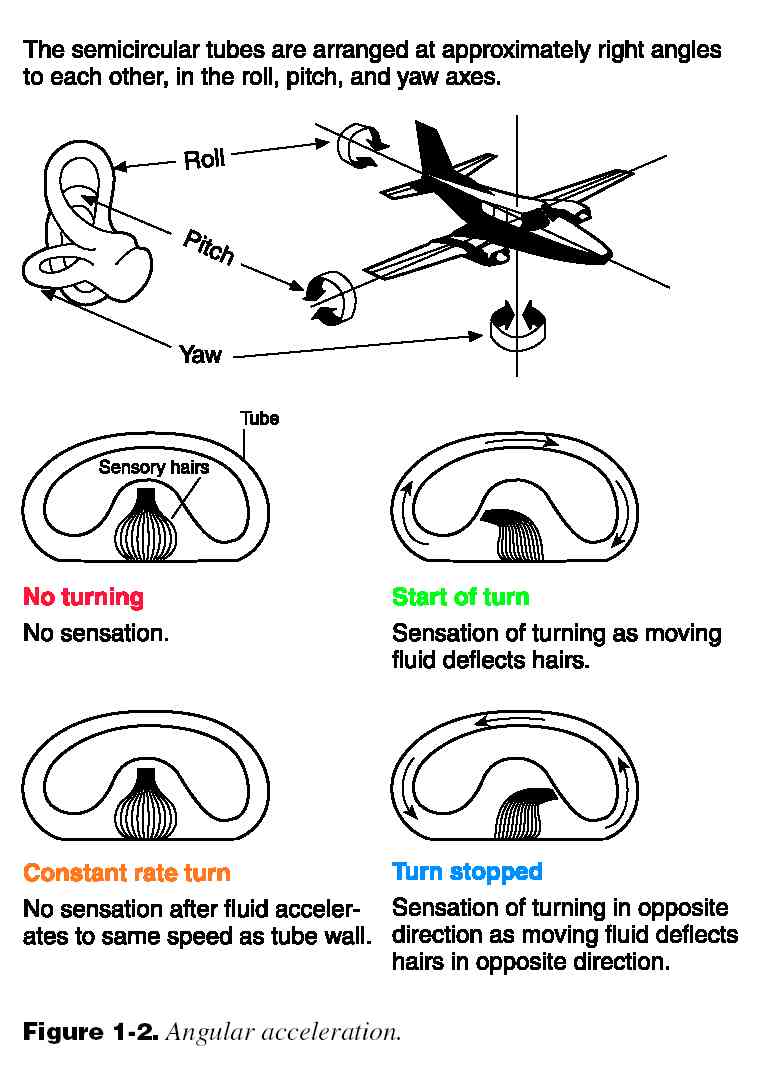
the orientation, and this can be characterised by a three component angular velocity vector ω. Within each of
our inner ears there are three more or less orthogonal semicircular canals (SCC), filled with fluid
(endolymphe), which fluid will lag the head due to inertia. A piston-like valve (culupa) detects this flow of
fluid, and signals the head rotation. Due to friction and the fact that the cupulae are fixed to the head, the
fluid flow is damped, such that the neural canal
signals are proportional to a high pass filtered angular
velocity signal (e.g. van Egmond et al., 1949; Robinson, 1977). This implies that the SCC are insensitive to
constant angular head velocity, and this is just what causes the illusions shown in Figs. 2 and 3
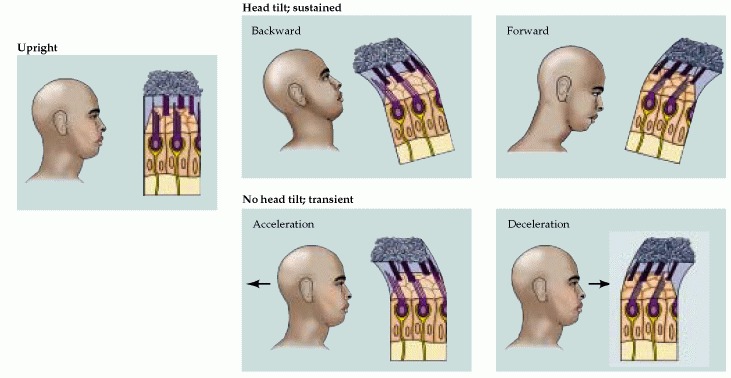
Within the sac connecting the canals, there are two layers
of heir cells with crystals on top (the otoliths, see
Fig. 8, which crystals have a higher specific density than the surrounding matter, such that these will lag due
to inertia too, here to linear motion (
a=d2x/dt2
). However, these otoliths will also be attracted by gravity on
earth (see Fg. 9, and they will also signal proportional to gravity (
g=Fg/m
). Therefore, also these otolithic
sensors are not capable of discerning inertial from gravitational accelerations. This results in 9 DoF that have
to be dealt with on earth (i.e. 3 inertial acceleration components, 3 gravity components, and 3 angular
velocity components). For the remainder we assume that
the otoliths transduce the resultant acceleration, or
specific force, near perfection (e.g. Merfeld et al., 1993), i.e. their output is proportional to
f=a+g
*f=ac+g
the accelerations due to motion (inertia) en due to gravity are indistinguishable,
and if we would not discern gravity as such, we might feel like an astronaut within five minutes (
∆x=∫∫gdt2= ½gt2≈440 km, with g= 9.81 m/s2and∆t= 300 s). Obviously we do not feel this, and apparently our CNS
does do something to the otolith afferents to make the distinction. Another example includes tilt. When tilted
on earth, the gravitational acceleration may be exactly e
qual to the resultant of gravity and an acceleration
forward and slightly downward (see Fig. 10) In the first example, some CNS-processing on otolith afferents
only is requested, while in the second example, angular information from the SCC may aid in the solution to
estimate motion and gravity. How this function of the CNS may be described mathematically is summarised
in the next section on a spatial orientation model.
Circular vection: Ves + V
If we are looking at a moving environment rotating about an earth vertical axis while
sitting still, within several seconds we will experience a self rotation, instead of object rotation. This
phenomenon is called circular vection. This sense of motion can be achieved by any visual stimulus, as long
as changes in contrast are present. No interpretable structures are required, and a random dotted pattern
suffices. This means that optic flow, characterised by velocity (here angular velocity) is the determinant of
vection. If this sense of self motion is next combined with the deficient sense of self rotation during true self
motion when rotating about an earth vertical axis in the dark at constant velocity, these two signals will just
add to a veridical sense of self motion. This is illustrated in Fig. 13
Fig. 13.
Circular vection. When rotated about an earth
vertical axis, visual motion will result in a
slowly increasing sense of self motion, while tr
ue body motion will result in a slowly decreasing
sense of self motion. The addition of both
results in a true sense of self motion
Linear vection:
Something similar holds for linear vection, and this is most often exemplified by the train
that is leaving the platform next to ours, inducing a strong sense of self motion in the opposite direction.
Because this process is not counteracted by filtering of motion sensor signals as is the case with angular
motion, linear vection is much faster than circul
ar vection. Because we do not “see” acceleration, linear
vection should be characterised in terms of velocity, and linear motion as sensed by the vestibular system
(i.e. linear acceleration) should accordingly be integrat
ed over time before it can interact with the visual
velocity perception. At first order approximation we assume a linear weighted addition (c.f. Howard, 1997)
of vestibular and visual velocity signals to take pl
ace to determine the final linear velocity perception. Vision
will generally be dominant in this process (e.g. the train illusion).
Attitude perception:
Things get more complicated when describing the visual-vestibular interactions with
respect to attitude perception. Then, there are (at least) three factors of interest. First vestibular cues are at
steak, as described in the previous section. Second, visual cues can be separated in polarity and frame
information. Trees and houses generally point upward, while horizontal and vertical structures aid in
determining horizontality and verticality. Lastly, there is also a sense of verticality determined by our own
longitudinal body axis. This effect is most evident in weightlessness, when subjects can still indicate their
sense of verticality, which, generally aligns with their longitudinal body axis. This contribution is called the
idiotropic vector (Mittelstaedt, 1983). These contributions
are sketched in Fig. 14, and they are also assumed
to interact by means of a linear weighted addition
A visual-vestibular spatial orientation model
Putting these assumptions together, we come up with a model as sketched in Fig 15. According to this
model, spatial orientation is thus characterised by at least four variables, in this case four vectors, with three
(Cartesian) components each. These variables are linear
acceleration, linear velocity, angular velocity, and
our sense of attitude means of the estimate of the gravitational vector. Because linear acceleration is closely
linked to force by Newton’s second law (
F=ma), the perception of acceleration may also be closely related
to force perception. The estimation of the gravitational v
ector is also called the subjective vertical (SV). Due
to the different interactions involved, the four variable
s may all behave differently, and are therefore (partly)
independent. When characterising spatial orientation this way (i.e. by means of four vectors), it will also be
evident that spatial orientation is a complex matter, which interpretation is further complicated by our limited
intuitive sense to form a notion of (mainly angular) motions and attitude in three-dimensional space
*gular velocity is always below 3°/s,which is assumed to be below the threshold for angular motion perception.
n the simple servo model of Fig. 1, sensory
deficiencies and CNS delays will directly deteri
orate the system’s performance. To overcome these
problems, it is nowadays believed that the central ner
vous system uses a so called internal model of the body
dynamics, that, when fed with a copy of the motor commands (the efference copy), may give a prediction of
body motion that is more accurate than that estimated by our sensory system (Bos & Bles, 2002). If this
internal model next includes a copy of the sensory dynami
cs as well, the difference between true sensory and
internal model afferents may be used in addition for adaptation purposes. Optimally this difference should, of
course, be zero. We have previously shown that this difference, or conflict, when modelled properly,
correlates well with motion sickness (Bos & Bles, 1998, 2002; Bles et al., 2000). Another extension concerns
the addition of somatosensory cues, also referred to as
“the seat of the pants”. If, for example, acceleration
perception is linked with force perception as stated earlier, than we will need the interaction with
somatosensory cues to command the oscillating perception of acceleration after the centrifuge deceleration in
n the simple servo model of Fig. 1, sensory
deficiencies and CNS delays will directly deteri
orate the system’s performance. To overcome these
problems, it is nowadays believed that the central ner
vous system uses a so called internal model of the body
dynamics, that, when fed with a copy of the motor commands (the efference copy), may give a prediction of
body motion that is more accurate than that estimated by our sensory system (Bos & Bles, 2002). If this
internal model next includes a copy of the sensory dynami
cs as well, the difference between true sensory and
internal model afferents may be used in addition for adaptation purposes. Optimally this difference should, of
course, be zero. We have previously shown that this difference, or conflict, when modelled properly,
correlates well with motion sickness (Bos & Bles, 1998, 2002; Bles et al., 2000). Another extension concerns
the addition of somatosensory cues, also referred to as
“the seat of the pants”. If, for example, acceleration
perception is linked with force perception as stated earlier, than we will need the interaction with
somatosensory cues to command the oscillating perception of acceleration after the centrifuge deceleration in
Fig. 19.